I have a few roller blinds ripe for automation. The first attempt used a stepper motor with a 3D printed cog to pull the cord.
Remains of cord puller
This worked but had the look of a Heath Robinson / Rube Goldberg love child so I looked for a neater solution.
Hardware
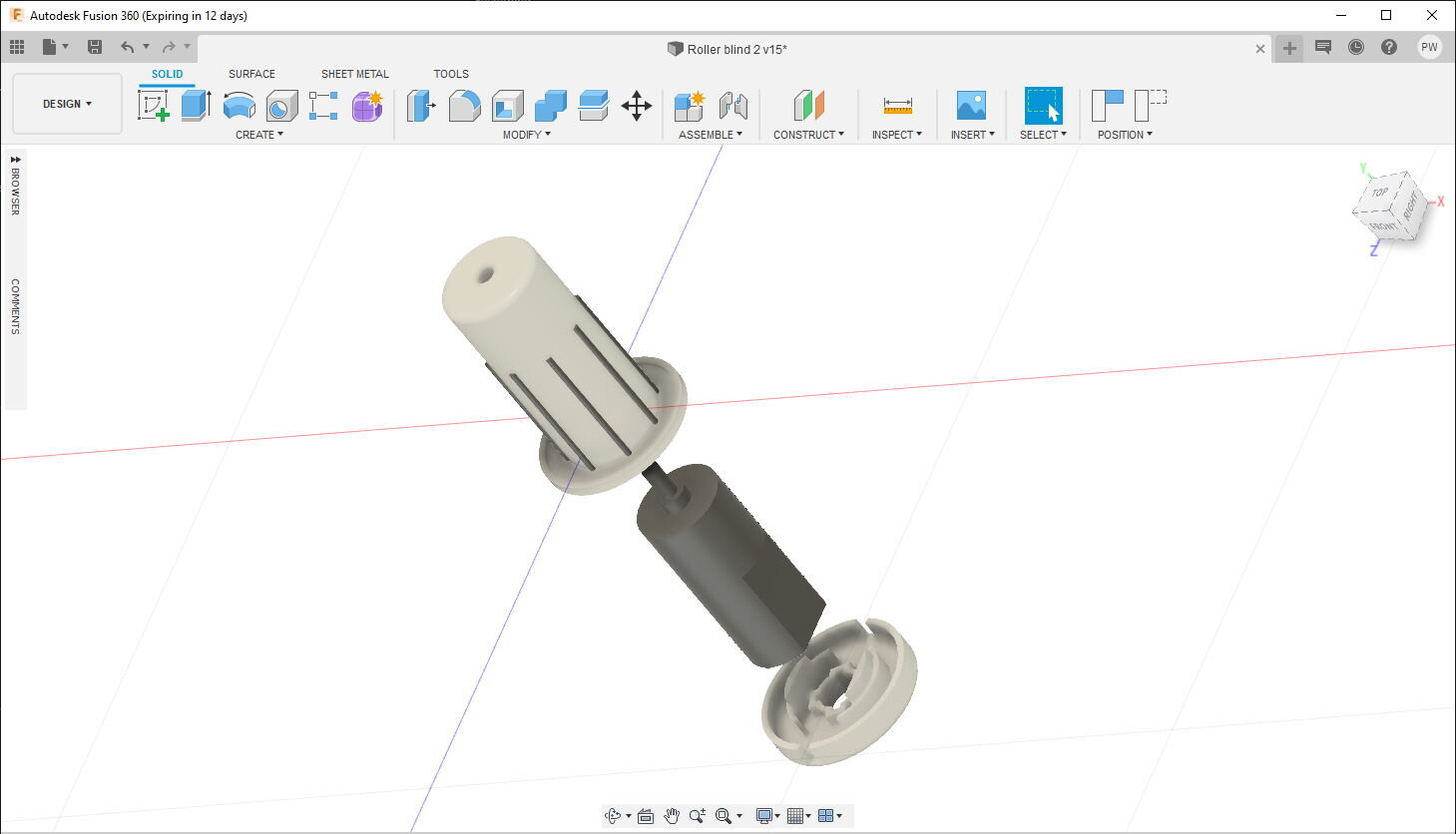
Tubular motors that fit inside the roller tube can be bought online but were rather expensive and bulky for my purposes so I opted for a more compact design. Taking measurements from the existing blind pulley mechanism and a suitable 30 RPM 12v DC motor with 20mm external diameter:
let me design a replacement in Fusion 360
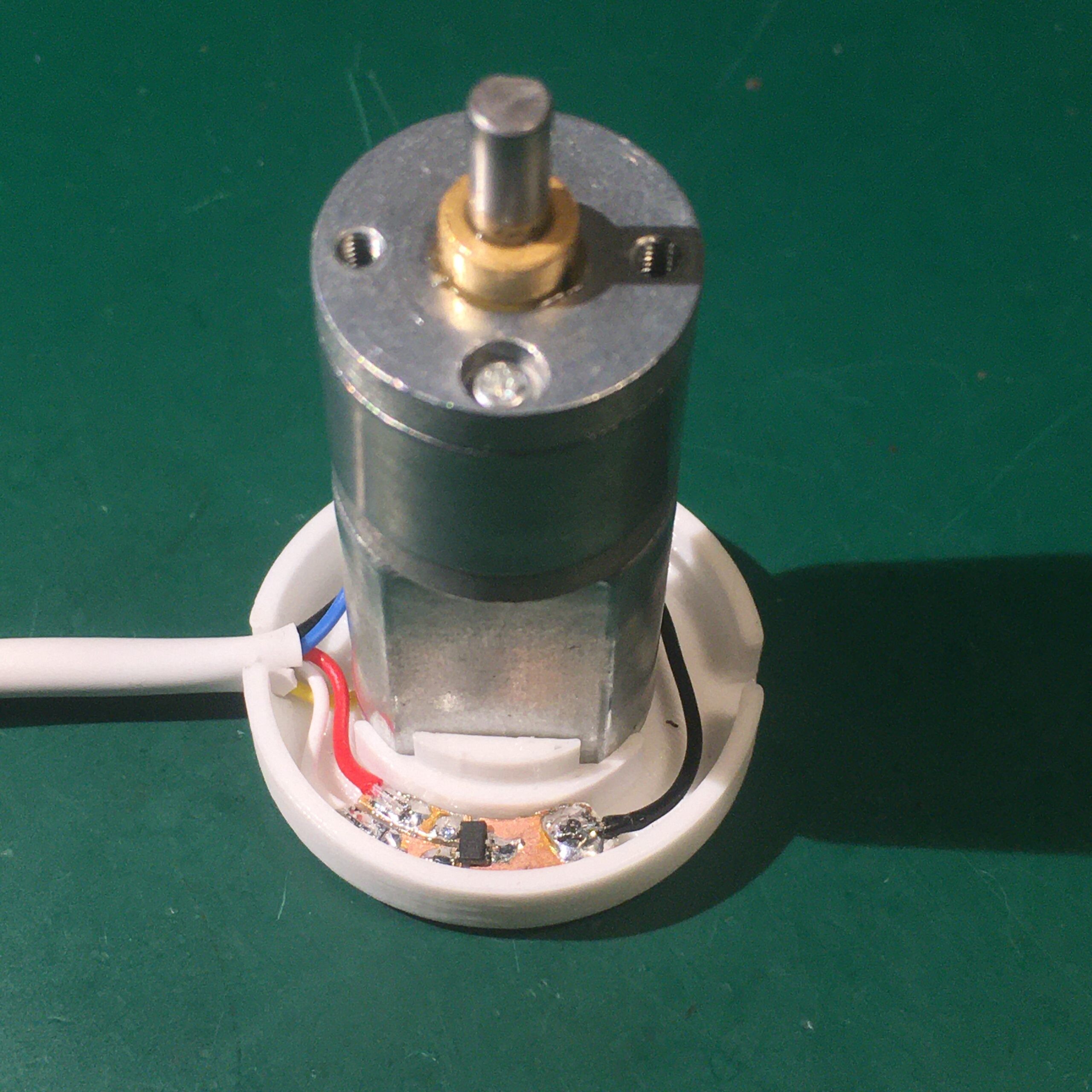
Using a DC motor requires some sort of encoder to keep track of the blind position. I opted for a magnet/hall sensor mounted in the drive mechanism. This keeps the the sensor unobtrusive but limits the resolution to one revolution (about 10 cm of blind travel in my case). I hoped that combining this with timing data would be accurate enough. It was.
Output from the printer. Note a small 2 x 1 mm magnet has been inserted in one of the holes.
I hand carved a small PCB to hold the Si7025 hall effect sensor and connected everything up.
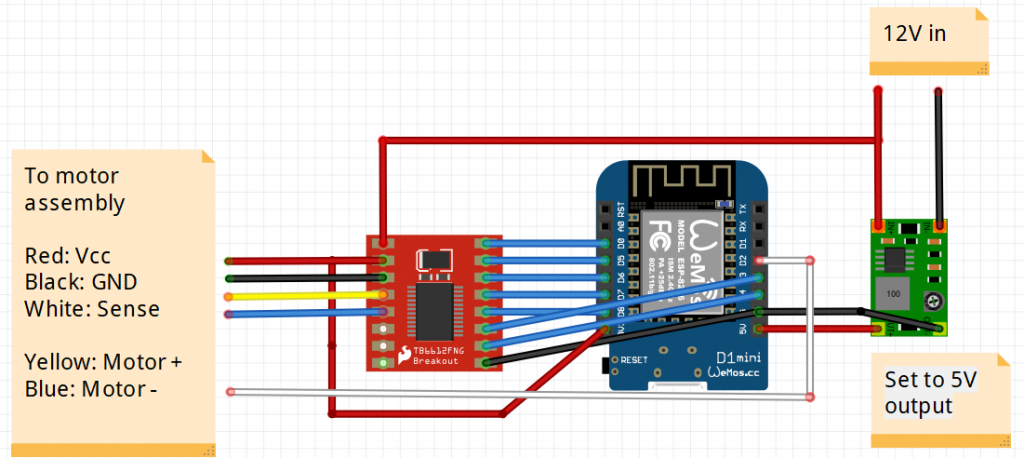
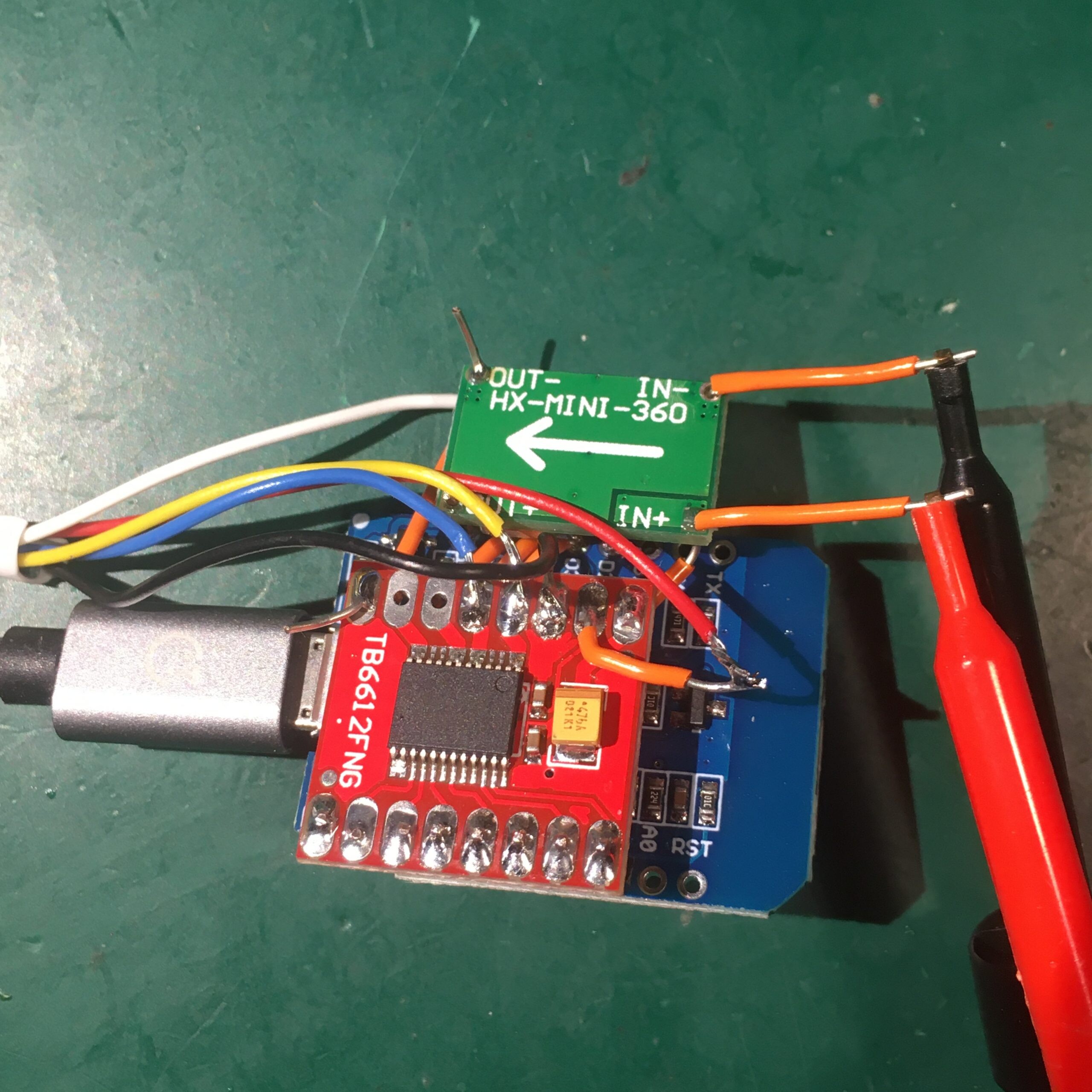
For the controller I used a Wemos D1 mini with a TB6612FNG driver module which can handle up to two DC motors. A small buck converter supplies 5V for the electronics from the 12V motor supply. All wired together in point to point style:
Software
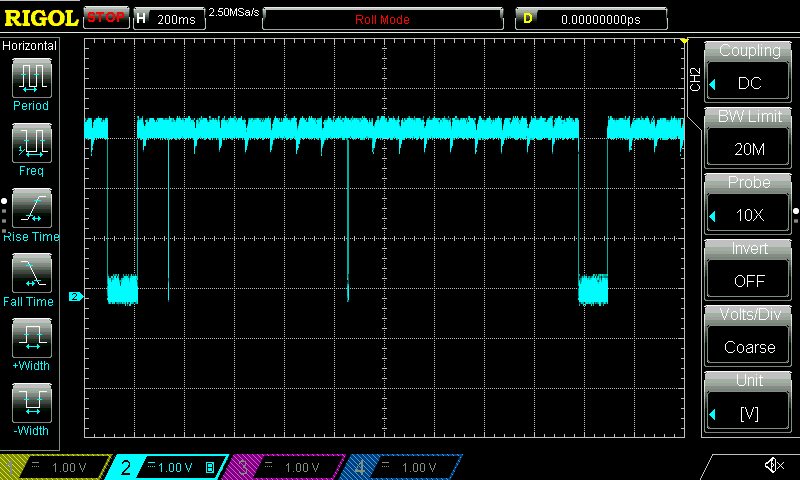
The code was written using the Arduino IDE. One unexpected problem was occasional glitches on the sensor output. This screenshot of the sensor output while running at 30 rpm shows the expected high -> low transitions as the magnet passes the sensor, but with the occasional spurious pulse. These pulses were always less than 1ms duration so are simply filtered out in software.
To move the blind to a given position, the software moves to the next magnet home position, then counts complete revolutions while timing how long each revolution takes, and then keeps the motor running for the required time to move the remaining distance.
An MQTT API was implemented, controlled from a Node Red flow.
Installation
A small case to contain the electronics was 3D printed and wired up to a 12 V power supply.
I have a three year old DeLonghi DEM10 dehumidifier whose low temperature warning light is now permanently on. The unit is indoors where the temperature never drops to such low levels.
Internet searching suggested a faulty capacitor on the main PCB. I replaced this but to no avail.
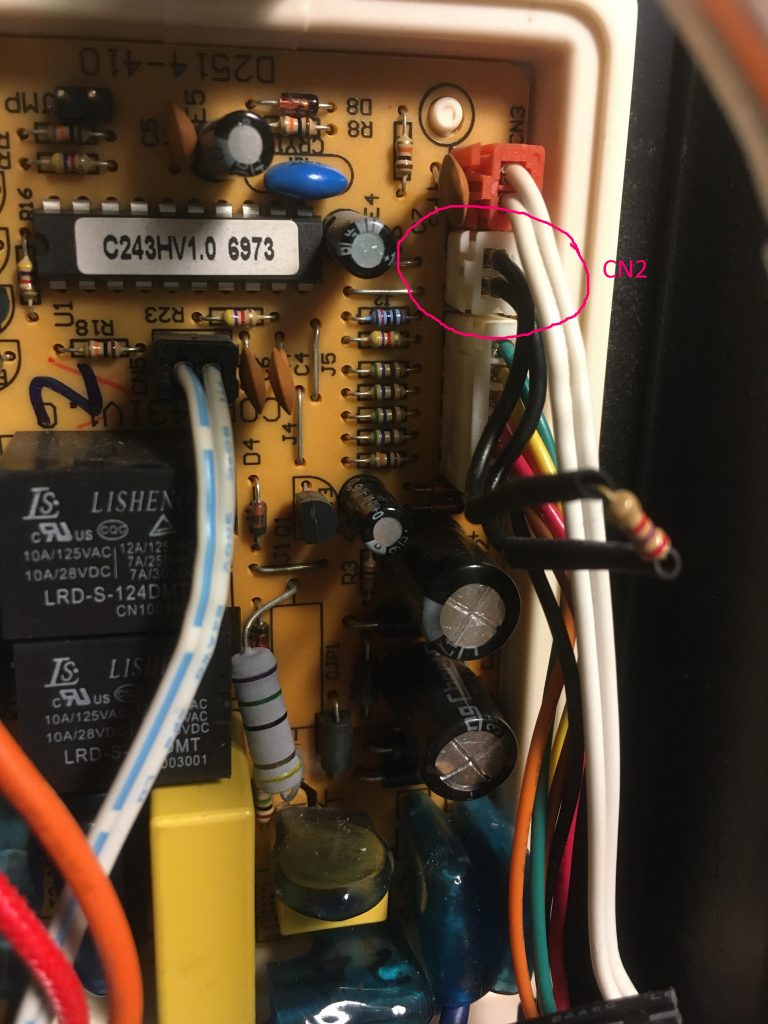
The schematic shows that connector CN2 leads to the temperature sensor. Disconnecting this and measuring with a multi-meter showed a sensor resistance of 650 ohm. I experimented with a few different resistances and it seems that anything above about 1500 ohms turns the warning light off. I settled for 2k7 ohms, cut the sensor lead, soldered it in place and covered with heat shrink.
This project couples a variac with an isolation transformer.
Two design decisions to make:
1. Does the isolation transformer go before or after the variac? Here it was placed after the variac as the variac was rated to 4A and the transformer 5A. Any turn-on surge current will be less through the variac.
2. Is an earth connection passed through to the output socket? No, because it’s an isolation transformer 😉 For convenience the earth connection is made available separately on the front panel.
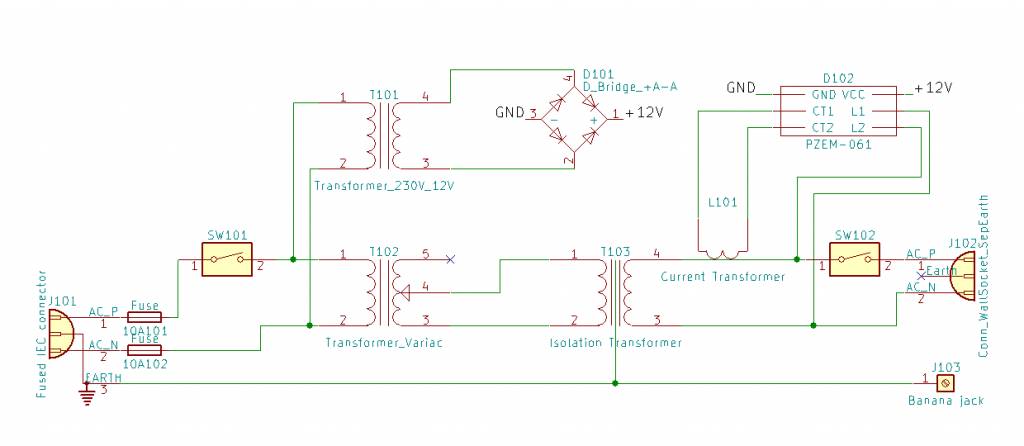
The schematic is straightforward:
A PZEM-061 module is used to display output voltage, current and power. It is hacked (ref 1) to run off a separate 12V supply which is sourced from a small transformer to maintain isolation.
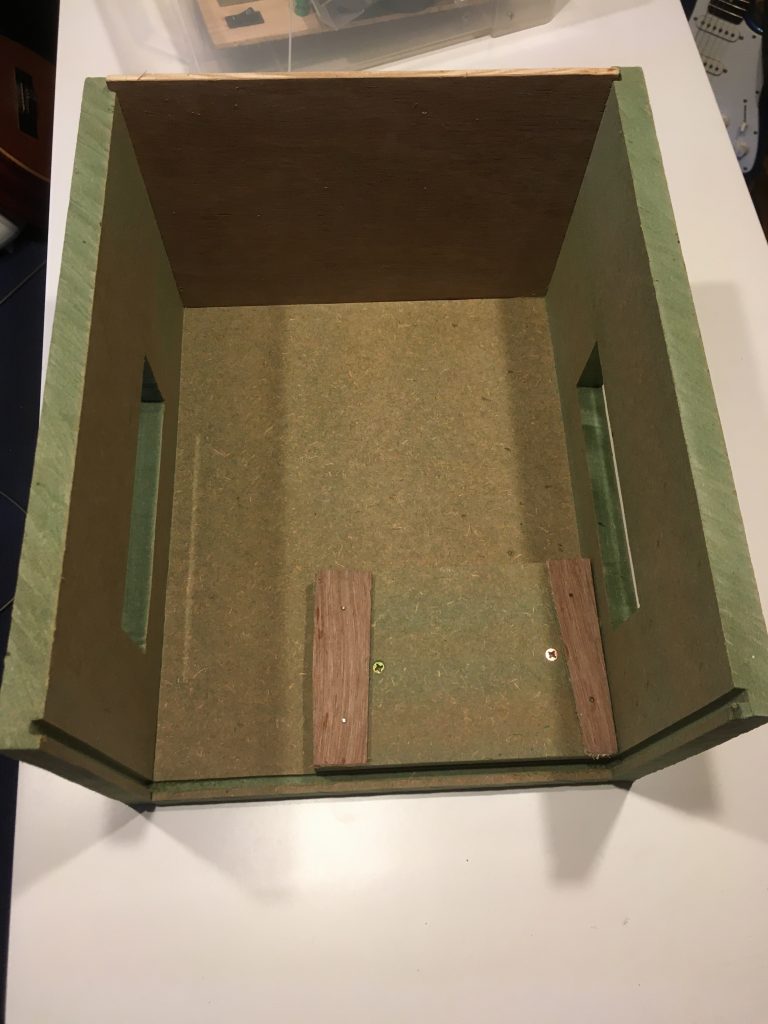
A box was constructed from MDF and plywood to contain the hardware.
With two large transformers the unit weighs in at 25 kg.
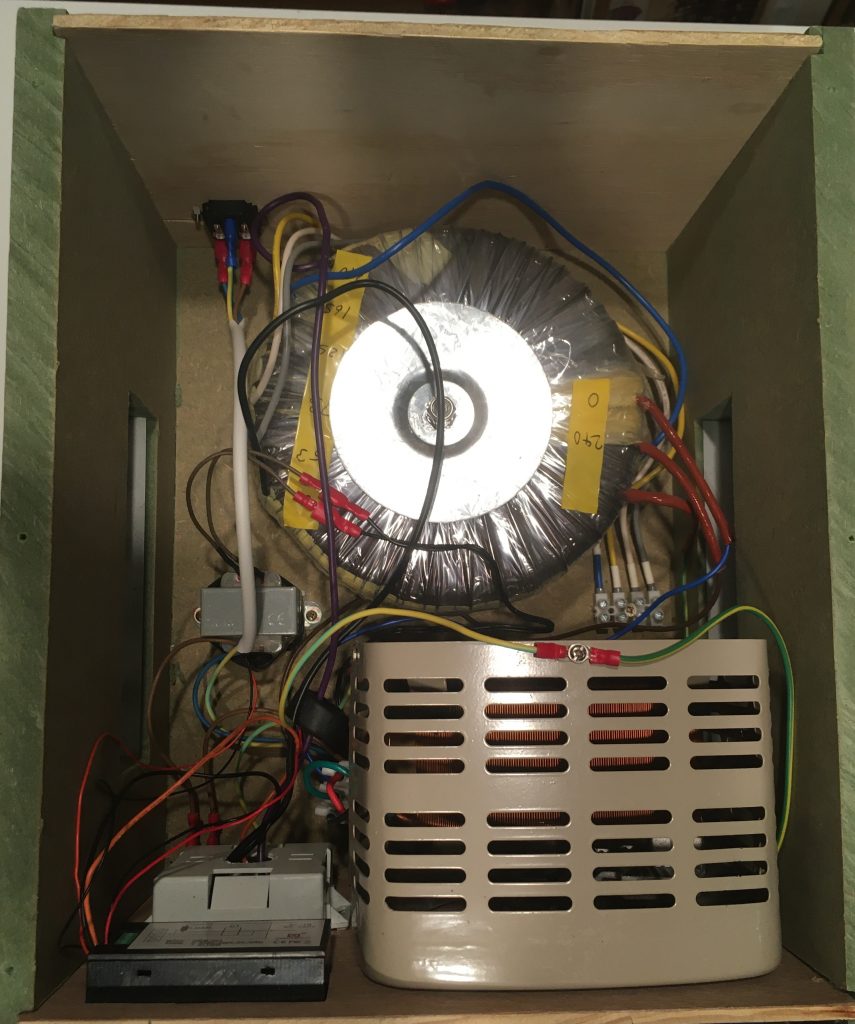
Interior view
The variac was positioned so it pokes through a hole in the front panel. Re-using its original scale gives a rough idea of the voltage and tidies up the hole. Even the rubber feet were reused.
This project describe the construction of a tangible user interface which allows the creation of music from an arrangement of physical blocks.
Coloured blocks are laid out on a flat surface and observed by an overhead camera. Computer vision algorithms are used to convert the pattern of blocks into a set of musical notes. Changing the position of the blocks changes the audio output in real-time.
Inspired by Yamaha’s Tenori-on
Details
Lego blocks (other plastic blocks are available) are arranged on a virtual 16 by 16 grid layout and a virtual cursor repeatedly scans the grid from left to right. As the cursor reaches each grid column, the blocks in that column trigger a note to be played, the pitch of which is determined by the vertical position of the block. Multiple blocks in a column result in multiple notes being played simultaneously.
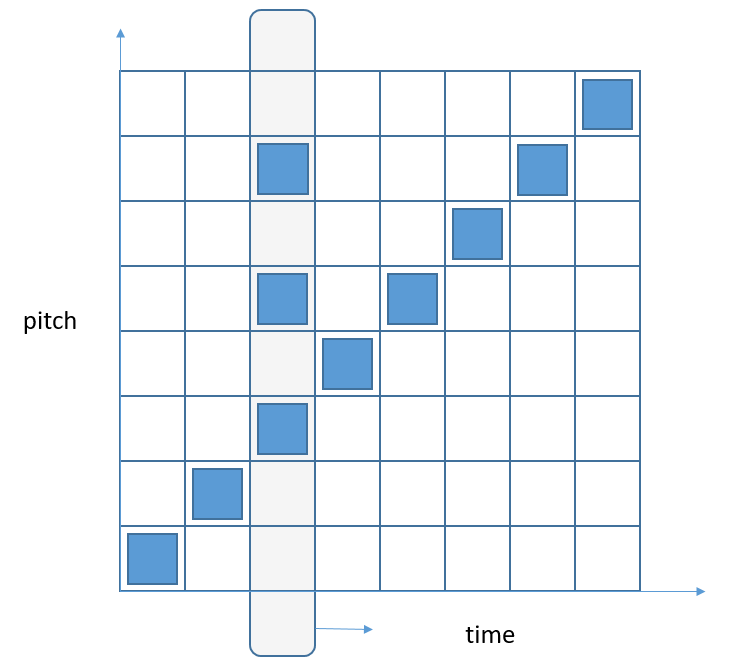
Here’s a diagram to show the principle more clearly. Time is on the horizontal axis and pitch on the vertical axis. (For simplicity this shows an 8 by 8 grid)
This arrangement of blocks would play an ascending scale. When the cursor is at the position shown a three note chord would be played.
The final pitch of a note is not only determined by the position on the grid, but also by the user-selectable scale. There are nine scales in the software which map position to pitch. The pitch can also be globally transposed in semitone or octave increments.
Hardware design
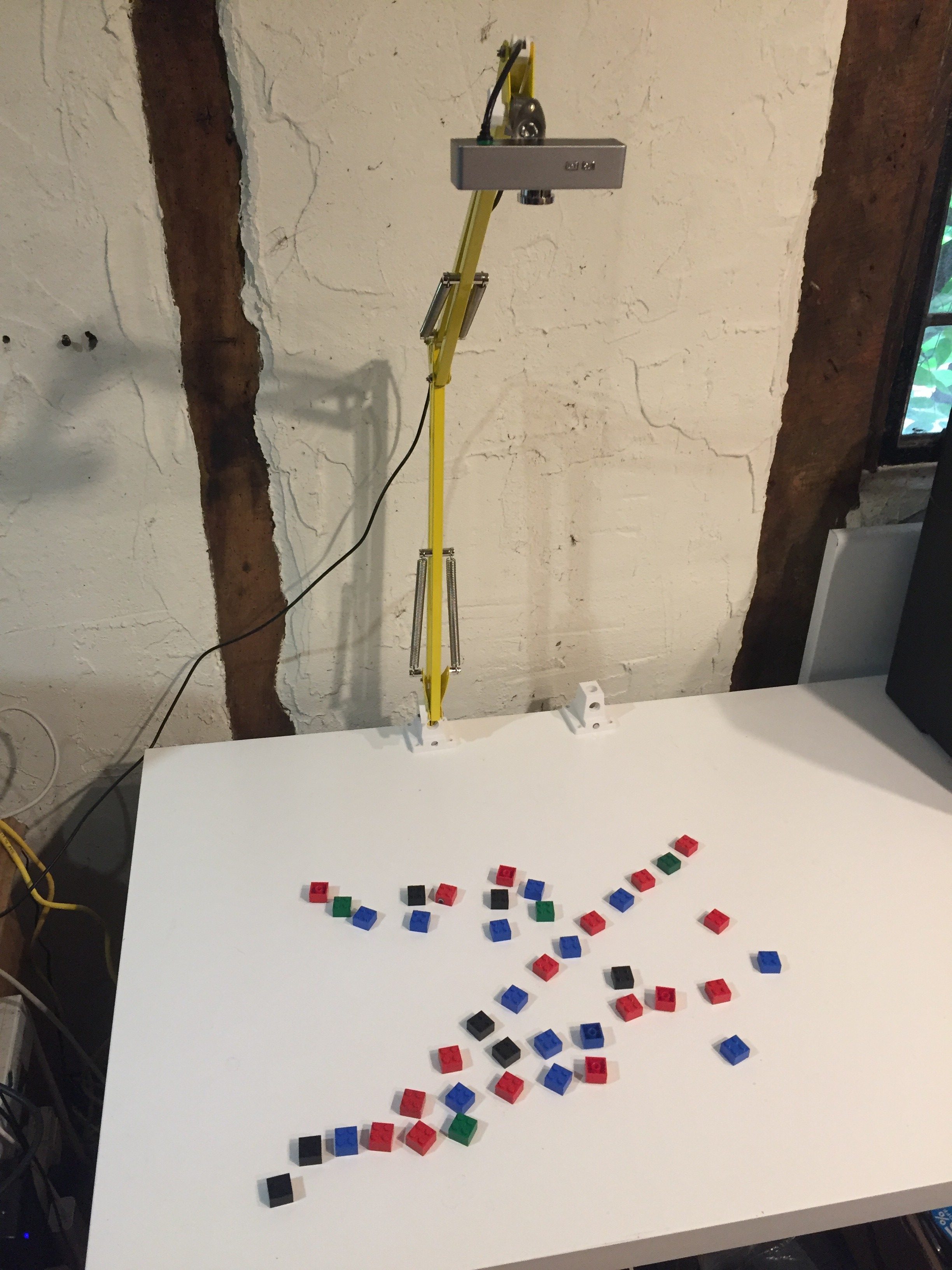
The hardware consists of a webcam and some blocks. The webcam is connected to a laptop where all image processing and sound generation takes place.
To keep it simple Lego blocks were used. They have a consistent size and shape and should make it easier for the computer vision system to reliably track them. It was found that yellow blocks were not reliably detected and are more sensitive to lighting conditions. Other darker colours worked better.
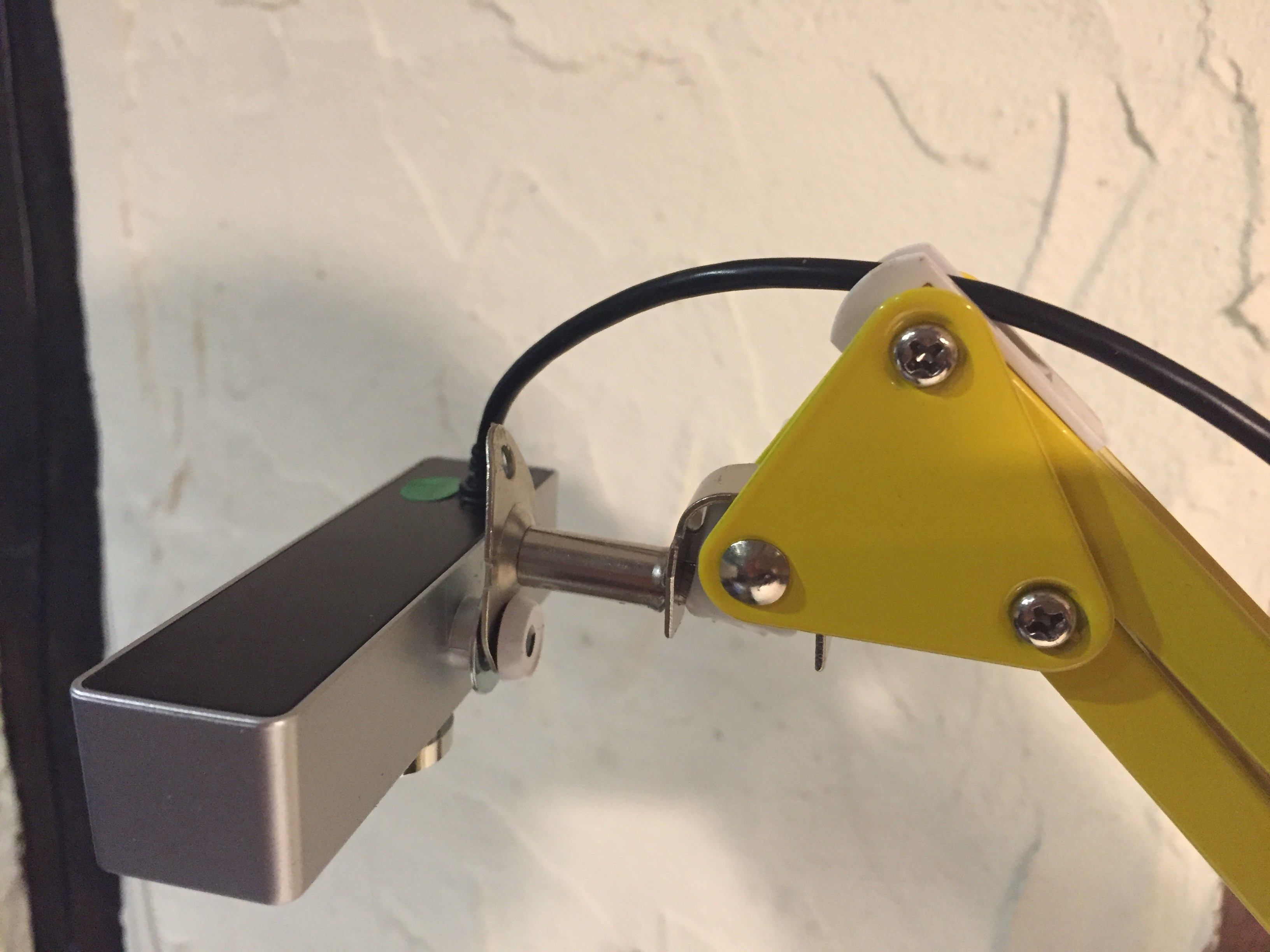
The webcam used was a “GUCEE HD92 720P” model. A resolution of 640 x 480 is sufficient for this project so most webcams should work OK.
The webcam was mounted directly over the blocks using a hacked IKEA Tertial lamp. The original webcam clip was removed and the lamp bracket drilled out to accept the fitting.
For audio output the built-in PC sound card was used.
Software Overview
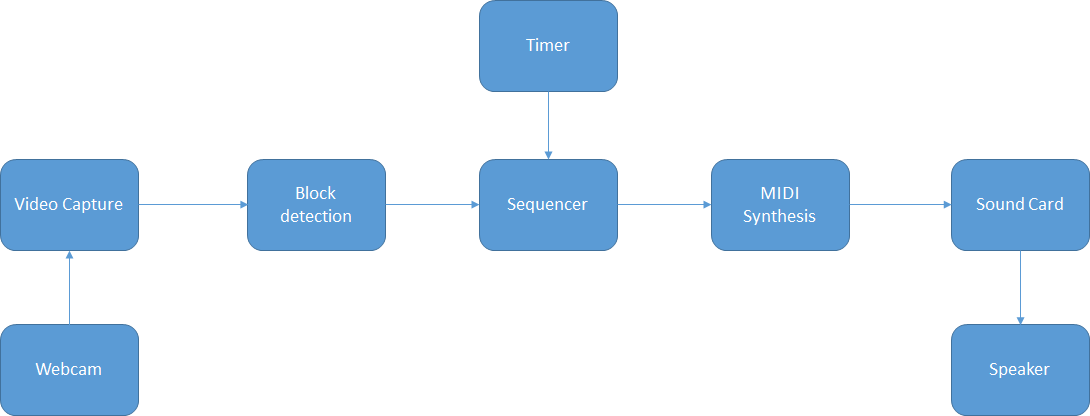
The overview of the system is as follows:
On the left are the vision components. These are responsible for getting images of the blocks from the webcam and converting them into a set of notes to be played. Open CV is a well known library for image processing and here we use the Emgu.CV wrapper for C#/.Net
On the right are the audio components. These convert the extracted notes into sound. The NAudio library is used for MIDI sound synthesis.
Software – Audio subsystem
The key component here is the Sequencer. This maintains the sequence of notes to be played and steps from one set of notes to another on receipt of a timer tick. Once the last note has been played it repeats from the beginning.
The human ear is very sensitive to changes in timing of sounds, so it’s important to use a regular beat for the timer. Standard Windows timers have a resolution of about 15 ms which is not quite good enough. Using the multimedia timer gives a resolution down to 1 ms and can be set to generate a periodic time tick with good consistency.
To simplify the audio output code MIDI synthesis is used. This avoids having to deal with analogue waveforms and keeps all audio in the digital domain. For this project the built-in Windows Microsoft GS Wavetable MIDI Synth is used. This is not the best sounding, but it allows up to 32 notes to be played simultaneously from a selection of 127 instruments and is adequate for our purposes.
The sequencer component can be run and tested independently. A sequence can be loaded using the SetNotes method which takes a 2-dimensional array of Notes and will then play that sequence in a loop until stopped.
Software – Vision subsystem
The job of the vision subsystem is to keep the sequencer updated as the arrangement of the blocks is changed.
The software continually grabs video frames from the webcam, identifies the block positions and maps them to cells on a 16 by 16 virtual grid. These cells are then converted to an array of notes for loading into the sequencer.
To identify the blocks the “SimpleBlobDetector” class from Emgu.CV is used. As the name suggests this identifies blobs in an image and outputs a list of the blob centroids (the coordinates of the block centres). The blob detector can be configured to only accept blobs in a certain size range, which can be optimised by trial and error for the particular blocks used.
Once the block coordinates are obtained they can be mapped to the nearest grid cells and then to an array of notes, the cell row and column giving the pitch and order of the notes respectively. The note array is then loaded into the sequencer.
This process runs independently of the sequencer so differences in frame rate or blob detection time do not affect the timing of the audio output.
The video sub system also displays the captured images and overlays some markers showing the positions of detected blocks and the current grid column being played.
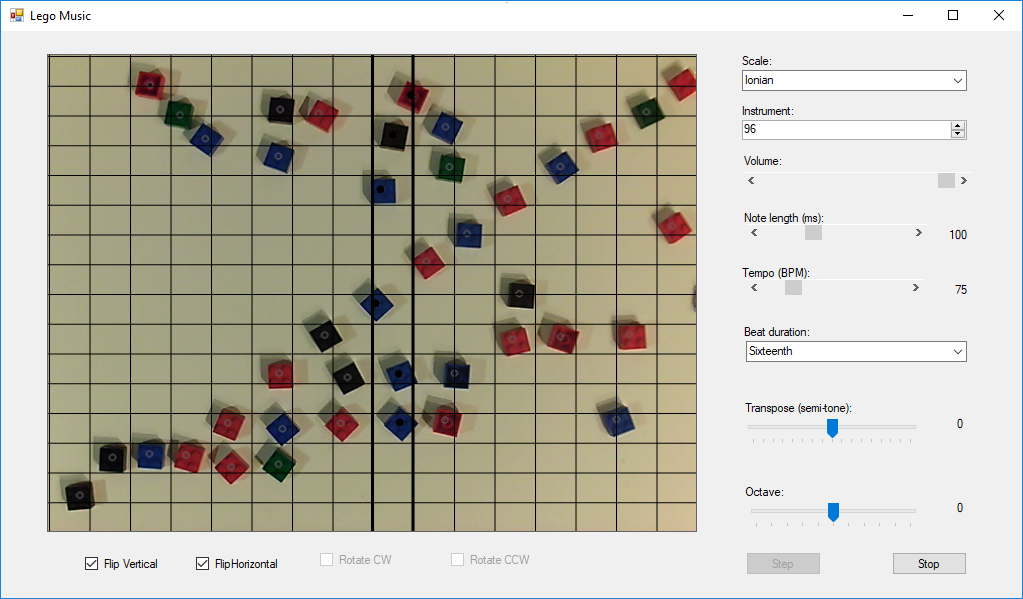
User Interface
In addition to the tangible blocks interface there is a traditional Windows Forms user interface. This allows parameters such as tempo, instrument, transposition and octave parameters to be set. These parameters can be altered while the audio is playing and it will react in real time.
The user interface also shows the view from the webcam and overlays some markers showing the positions of detected blocks and the current grid column being played.